 V-BOX WECON
V-BOX WECON 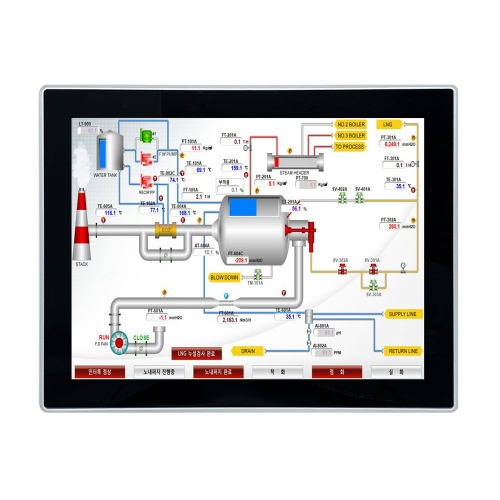 MÁY TÍNH CÔNG NGHIỆP HOLA
MÁY TÍNH CÔNG NGHIỆP HOLA  PHẦN MỀM
PHẦN MỀM 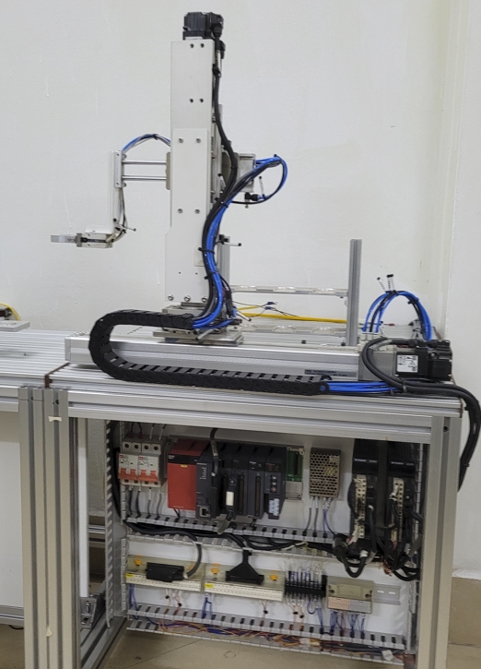

Tổng quan
Bài 1. CẤU TRÚC PHẦN CỨNG VÀ ĐẤU NỐI INPUT/OUTPUT CHO QPLC
1.1 Tìm hiểu cấu trúc phần cứng của PLC dòng Q.
1.2 Phân loại QCPU
1.3 Thực hành nhận biết, tháo lắp các module QPLC
1.4 Thiết kế hệ thống PLC
1.6. Tính toán vị trí modul và địa chỉ vào ra
1.7 Kết nối PLC với máy tính
Bài 2. HƯỚNG DẪN CÀI ĐẶT PHẦN MỀM VÀ SỬ DỤNG PHẦN MỀM GX-WORK 2
2.1. Quy trình xây dựng hệ thống PLC
2.2. Tạo dự án, Viết chương trình cơ bản, biên tập chương trình, Download, Upload, tạo ghi chú, lưu dự án.
2.3. Sử dụng chế độ giám sát, viết chương trình
2.4 Chẩn đoán lỗi và gỡ lỗi
2.5. Sử dụng chế độ mô phỏng
Bài 3. Cài Đặt Tham Số Bộ Nhớ và Thanh Ghi.
3.1. Hệ cơ số Nhị phân (BIN) Thập phân (DEC), Thập Lục Phân (HEX).
3.2. Bit, Byte, Word, Double Work
3.3 Bộ nhớ dùng cho modul PLC, Bộ nhớ chương trình, Ram, Rom ...
3.4. Cài đặt dữ liệu: relay, Data
3.5. Cài đặt dữ liệu: Time, Bộ nhớ đặc biệt
Bài 4. PLC Q lệnh cơ bản
4.1. Lệch cơ bản sử dụng Bit: LD, AND, OR, NOT, OUT, SET, RESET , PLS, PLF, TIMER, COUNTER
4.2. Lệch cơ bản sử dụng Thanh Ghi: MOV, FMOV, BMOV, So Sánh, Toán Học.
4.3. Lệch cơ bản sử dụng Thanh Ghi: INC, DEC.
ài 5. Điều khiển tuần tự
5.1. Phân Tích bài toán điều khiển tuần tự.
5.2. Xây dựng lưu đồ thuật toán
5.3. Lệnh DECO và ứng dụng trong điều khiển tuần tự .
5.4. Thực hành Lập trình chương trình ứng dụng điều khiển theo tuần tự cho mô hình
4.4. Thực hành Lập trình ứng dụng sử dụng mô hình.
Bài 6. Lập trình HMI.
6.1 Hướng dẫn cài đặt phần mềm GT DESIGNER 3
6.2 Giới thiệu HMI Mitsubishi, kết nối phần cứng HMI với PLC
6.3 Tạo 1 dự án trên phần mềm GT DESIGNER 3
6.4 Hướng dẫn lập trình tạo nút ấn, công tắc, bóng đèn, màn hình chuyển trang
6.5 Hướng dẫn lập trình nhập liệu số, hiển thị số trên HMI….
Bài 7. GIỚI THIỆU VỀ SERVO, ĐẤU NỐI PHẦN CỨNG VÀ CÀI ĐẶT PARAMETER
7.1. Giới thiệu cấu trúc phần cứng của hệ servo điều khiển bằng QPLC
7.2. Đấu nối phần cứng đối với module QD75MH4 và MRJ3-B.
7.3. Cài đặt parameter
7.4. Tìn hiểu các Buffer Memory của module QD75
Bài 8. LẬP TRÌNH ĐIỀU KHIỂN MODULE QD75D2 VÀ QD75MH4
8.1. Lệnh chạy JOG
8.2. Các phương pháp về gốc
8.3. Thiết lập chương trình quản lý module QD75
Bài 9. CÁC PHƯƠNG PHÁP CHẠY VỊ TRÍ CHO MODULE QD75
9.1. Phương pháp chạy điểm tuyệt đối
9.2. Phương pháp chạy điểm tương đối
9.3. Cài đặt parameter cho chạy vị trí (position)
9.4. Chương trình chạy vị trí
1.1 Tìm hiểu cấu trúc phần cứng của PLC dòng Q.
1.2 Phân loại QCPU
1.3 Thực hành nhận biết, tháo lắp các module QPLC
1.4 Thiết kế hệ thống PLC
1.6. Tính toán vị trí modul và địa chỉ vào ra
1.7 Kết nối PLC với máy tính
Bài 2. HƯỚNG DẪN CÀI ĐẶT PHẦN MỀM VÀ SỬ DỤNG PHẦN MỀM GX-WORK 2
2.1. Quy trình xây dựng hệ thống PLC
2.2. Tạo dự án, Viết chương trình cơ bản, biên tập chương trình, Download, Upload, tạo ghi chú, lưu dự án.
2.3. Sử dụng chế độ giám sát, viết chương trình
2.4 Chẩn đoán lỗi và gỡ lỗi
2.5. Sử dụng chế độ mô phỏng
Bài 3. Cài Đặt Tham Số Bộ Nhớ và Thanh Ghi.
3.1. Hệ cơ số Nhị phân (BIN) Thập phân (DEC), Thập Lục Phân (HEX).
3.2. Bit, Byte, Word, Double Work
3.3 Bộ nhớ dùng cho modul PLC, Bộ nhớ chương trình, Ram, Rom ...
3.4. Cài đặt dữ liệu: relay, Data
3.5. Cài đặt dữ liệu: Time, Bộ nhớ đặc biệt
Bài 4. PLC Q lệnh cơ bản
4.1. Lệch cơ bản sử dụng Bit: LD, AND, OR, NOT, OUT, SET, RESET , PLS, PLF, TIMER, COUNTER
4.2. Lệch cơ bản sử dụng Thanh Ghi: MOV, FMOV, BMOV, So Sánh, Toán Học.
4.3. Lệch cơ bản sử dụng Thanh Ghi: INC, DEC.
ài 5. Điều khiển tuần tự
5.1. Phân Tích bài toán điều khiển tuần tự.
5.2. Xây dựng lưu đồ thuật toán
5.3. Lệnh DECO và ứng dụng trong điều khiển tuần tự .
5.4. Thực hành Lập trình chương trình ứng dụng điều khiển theo tuần tự cho mô hình
4.4. Thực hành Lập trình ứng dụng sử dụng mô hình.
Bài 6. Lập trình HMI.
6.1 Hướng dẫn cài đặt phần mềm GT DESIGNER 3
6.2 Giới thiệu HMI Mitsubishi, kết nối phần cứng HMI với PLC
6.3 Tạo 1 dự án trên phần mềm GT DESIGNER 3
6.4 Hướng dẫn lập trình tạo nút ấn, công tắc, bóng đèn, màn hình chuyển trang
6.5 Hướng dẫn lập trình nhập liệu số, hiển thị số trên HMI….
Bài 7. GIỚI THIỆU VỀ SERVO, ĐẤU NỐI PHẦN CỨNG VÀ CÀI ĐẶT PARAMETER
7.1. Giới thiệu cấu trúc phần cứng của hệ servo điều khiển bằng QPLC
7.2. Đấu nối phần cứng đối với module QD75MH4 và MRJ3-B.
7.3. Cài đặt parameter
7.4. Tìn hiểu các Buffer Memory của module QD75
Bài 8. LẬP TRÌNH ĐIỀU KHIỂN MODULE QD75D2 VÀ QD75MH4
8.1. Lệnh chạy JOG
8.2. Các phương pháp về gốc
8.3. Thiết lập chương trình quản lý module QD75
Bài 9. CÁC PHƯƠNG PHÁP CHẠY VỊ TRÍ CHO MODULE QD75
9.1. Phương pháp chạy điểm tuyệt đối
9.2. Phương pháp chạy điểm tương đối
9.3. Cài đặt parameter cho chạy vị trí (position)
9.4. Chương trình chạy vị trí
 0978.541.404
0978.541.404  0978.541.404
0978.541.404  Messenger
Messenger
 Youtube
Youtube